Hi Alex,
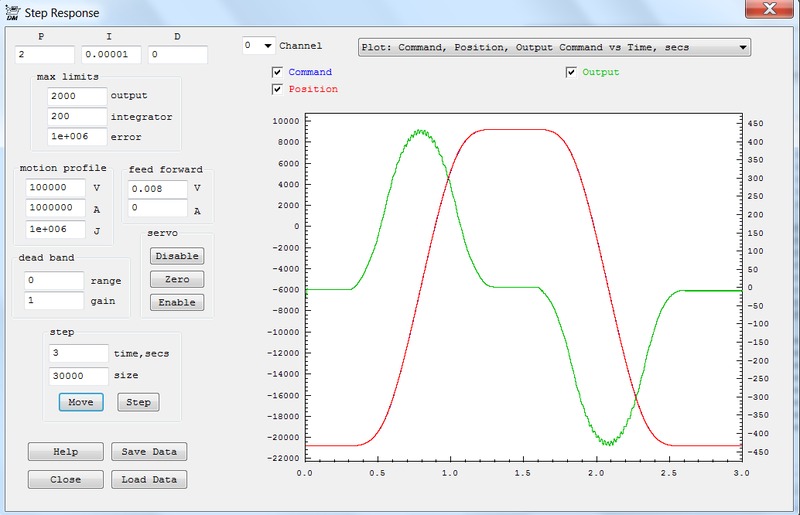
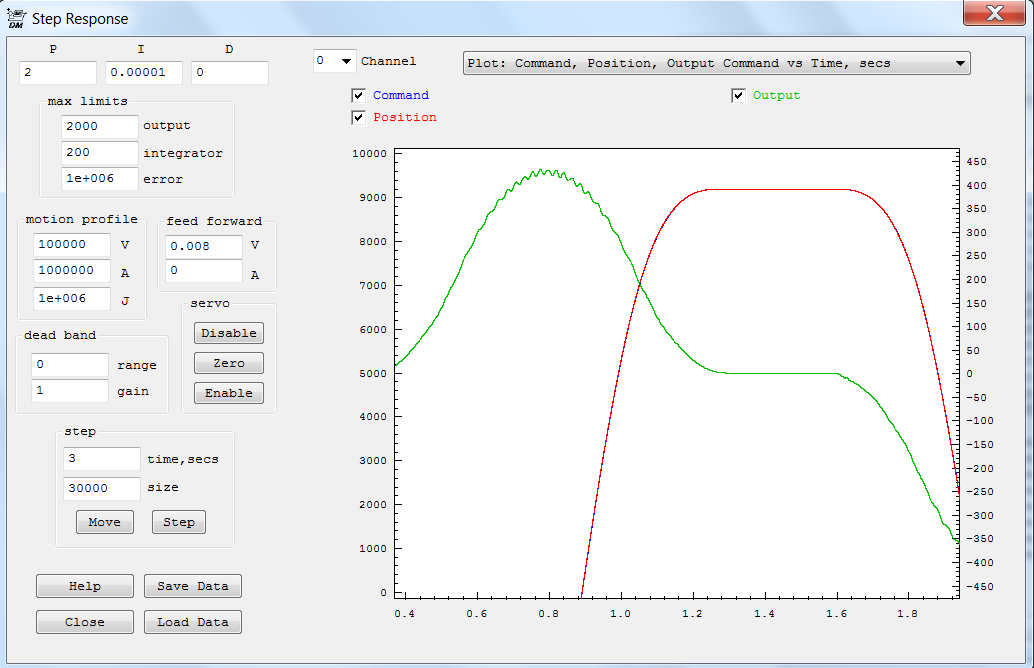
That doesn't look too bad. You didn't zoom in enough or plot Position Error so we could see clearly (or post the raw data so we could).
I assume that is a DAC Servo? What is your resolution? What is your lead screw pitch?
That may be just vibration or lead screw wobble that the servo is correcting.
More D Gain (combined with a 2nd order 1KHz Q1.4 Low Pass filter) may help and also allow higher P and I gains.
HTH
Regards
TK
| Group: DynoMotion |
Message: 12090 |
From: Tom Kerekes |
Date: 8/9/2015 |
| Subject: Re: noise in output |
Hi Alex,
The main purpose for using the Low pass filter is to reduce spikes in the Output that your Amplifier may not like. For example when using a D Gain of say 100 then each time the encoder suddenly changes by 1 count the output will spike 100 DAC counts for 1 Servo Sample. A low pass filter will smooth this out over a few samples. The low pass filter should use the 3rd filter so that it also applies to any Feed Forward. See:
Unfortunately Servo Tuning is fairly complex and difficult and will vary with each system.
Ben posted a great tuning guide. It is for a SnapAmp configuration but the basic methods are the same. See:
Regarding FeedRate changes. You can define what range will be performed in hardware for instant response. See:
And a Video:
HTH Regards TK
| Group: DynoMotion |
Message: 12091 |
From: az@aimele.com |
Date: 8/9/2015 |
| Subject: Re: noise in output |
Tom: Just jumping in with a question / clarification about FRO. Doesn't hardware FRO capability start at test version 4.33l(L)? not at the current release 4.32? I spent a few frustrating hours looking for it in 4.32 about two weeks ago. AZ ------- Original Message ------- From : Tom Kerekes tk@... [DynoMotion][mailto:DynoMotion@yahoogroups.com] Sent : 8/9/2015 2:28:19 PM To : DynoMotion@yahoogroups.com Cc : Subject : RE: Re: [DynoMotion] noise in output
Hi Alex,
The main purpose for using the Low pass filter is to reduce spikes in the Output that your Amplifier may not like. For example when using a D Gain of say 100 then each time the encoder suddenly changes by 1 count the output will spike 100 DAC counts for 1 Servo Sample. A low pass filter will smooth this out over a few samples. The low pass filter should use the 3rd filter so that it also applies to any Feed Forward. See:
Unfortunately Servo Tuning is fairly complex and difficult and will vary with each system.
Ben posted a great tuning guide. It is for a SnapAmp configuration but the basic methods are the same. See:
Regarding FeedRate changes. You can define what range will be performed in hardware for instant response. See:
And a Video:
HTH Regards TK
| Group: DynoMotion |
Message: 12092 |
From: Tom Kerekes |
Date: 8/9/2015 |
| Subject: Re: noise in output |
Hi AZ,
Hardware FRO was first added in Version 4.33a.
Regards TK
From: "'az@...' az@... [DynoMotion]" <DynoMotion@yahoogroups.com>
To: DynoMotion@yahoogroups.com
Sent: Sunday, August 9, 2015 1:12 PM
Subject: RE: Re: [DynoMotion] noise in output
Tom:
Just jumping in with a question / clarification about FRO. Doesn't hardware FRO capability start at test version 4.33l(L)? not at the current release 4.32? I spent a few frustrating hours looking for it in 4.32 about two weeks ago. AZ ------- Original Message ------- From : Tom Kerekes tk@... [DynoMotion][mailto:DynoMotion@yahoogroups.com] Sent : 8/9/2015 2:28:19 PM To : DynoMotion@yahoogroups.com Cc : Subject : RE: Re: [DynoMotion] noise in output
Hi Alex,
The main purpose for using the Low pass filter is to reduce spikes in the Output that your Amplifier may not like. For example when using a D Gain of say 100 then each time the encoder suddenly changes by 1 count the output will spike 100 DAC counts for 1 Servo Sample. A low pass filter will smooth this out over a few samples. The low pass filter should use the 3rd filter so that it also applies to any Feed Forward. See:
Unfortunately Servo Tuning is fairly complex and difficult and will vary with each system.
Ben posted a great tuning guide. It is for a SnapAmp configuration but the basic methods are the same. See:
Regarding FeedRate changes. You can define what range will be performed in hardware for instant response. See:
And a Video:
HTH Regards TK
| | | | | |
{kind=link}
{kind=link}